
歳差運動
歳差運動(さいさうんどう)とは、自転している物体の回転軸が、円を描くように動く現象です。
物体に固定されている座標を $\xi,\eta,\zeta$ とすると、外力がない場合のオイラーの運動方程式は以下になります。ここで $I_\xi,I_\eta,I_\zeta$ は主慣性モーメント、$\omega_\xi,\omega_\eta,\omega_\zeta$ は角速度を表します。
$$N_\xi=I_\xi\frac{d\omega_\xi}{dt}-(I_\eta-I_\zeta)\omega_\eta\omega_\zeta$$$$N_\eta=I_\eta\frac{d\omega_\eta}{dt}-(I_\zeta-I_\xi)\omega_\zeta\omega_\xi$$$$N_\zeta=I_\zeta\frac{d\omega_\zeta}{dt}-(I_\xi-I_\eta)\omega_\xi\omega_\eta$$
地球やコマのような対称形の物体は、3つの主慣性モーメントの内の2つが等しくなるため、
$$I_\xi=I_\eta\equiv I_1 , I_\zeta\equiv I_3 -①$$
と置くと、この物体の回転は以下の特徴を持ちます。この2つ目の特徴が歳差運動を表します。(②の導出)(③の導出)
- $\zeta$ 軸方向の角速度 $\omega_\zeta$ は一定となります。$$\omega_\zeta=\Omega -②$$
- 角速度ベクトル ${\bf \omega}$ の大きさは一定で、その方向は $\zeta$ 軸と一定の角度を保ちつつ、その周りを角速度 $\lambda$ で回転します。ここで $a$ は定数です。$$(\omega_\xi,\omega_\eta)=(a\cos{\lambda t},-a\sin{\lambda t}) -③$$$$\lambda=\frac{I_1-I_3}{I_1}\Omega$$
②の導出
オイラーの運動方程式に①の条件を適用すると、
$$I_1\frac{d\omega_\xi}{dt}=(I_1-I_3)\omega_\eta\omega_\zeta -(1)$$$$I_1\frac{d\omega_\eta}{dt}=(I_3-I_1)\omega_\zeta\omega_\xi -(2)$$$$\frac{d\omega_\zeta}{dt}=0 -(3)$$
(3)より、$\zeta$ 軸方向の角速度 $\omega_\zeta$ は一定(特徴1)が導かれます。
③の導出
(1)と(2)を $\Omega$ と $\lambda$ を使って表すと、
$$\frac{d\omega_\xi}{dt}=\lambda\omega_\eta$$$$\frac{d\omega_\eta}{dt}=-\lambda\omega_\xi$$
これらの連立微分方程式は、$\tilde{\omega}=\omega_\xi+i\omega_\eta$ と置くと以下のように表されます。
$$\frac{d\tilde{\omega}}{dt}=-i\lambda\tilde{\omega}$$
これを積分すると、定数 $a$ より、
$$\tilde{\omega}=ae^{-i\lambda t}$$
これを実数部と虚数部を分けて書くと、
$$(\omega_\xi,\omega_\eta)=(a\cos{\lambda t},-a\sin{\lambda t})$$
これより $\omega_\xi$ と $\omega_\eta$ は、半径が一定($=a$)の円を描く(特徴2)ことが分かります。
コマの運動
以下は重力の作用を受けている対称コマの運動を考えます。ここで、対称軸上の一点が固定されており、その点を原点 $O$ とします。空間に固定した座標を($x,y,z$)、コマに固定した座標をとし($\xi,\eta,\zeta$)、そして $O\zeta$ をコマの軸と定めます。
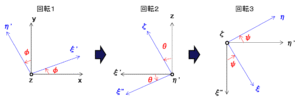
座標($x,y,z$)と座標($\xi,\eta,\zeta$)の関係を以下のオイラー角を使って表します。オイラー角では、初期の状態として座標($x,y,z$)と座標($\xi,\eta,\zeta$)を一致させ、次の3つの回転操作により、一般的な($\xi,\eta,\zeta$)の方向を定めます。
- 回転1:$z$ 軸の周りを $\phi$ 回転させる。
- 回転2:$\eta$ 軸($\eta’$ 軸)の周りを $\theta$ 回転させる。
- 回転3:$\zeta$ 軸の周りを $\psi$ 回転させる。

これら3つの座標変換は、行列を使って表現できます。ここで、各回転($\phi,\theta,\psi$)の回転軸方向の単位ベクトルを(${\bf e}_\phi,{\bf e}_\theta,{\bf e}_\psi$)、座標($\xi,\eta,\zeta$)の各軸方向の単位ベクトルを(${\bf e}_\xi,{\bf e}_\eta,{\bf e}_\zeta$)と定めると、単位ベクトルの変換は以下の回転行列で表すことができます。
$$\left(\begin{array}{ccc} {\bf e}_{\xi^{”}} \\ {\bf e}_\theta \\ {\bf e}_{\zeta} \end{array}\right)=
\left(\begin{array}{ccc} \cos{\theta} & 0 & -\sin{\theta} \\
0 & 1 & 0 \\
\sin{\theta} & 0 & \cos{\theta} \end{array}\right)
\left(\begin{array}{ccc} {\bf e}_{\xi’} \\ {\bf e}_\theta \\ {\bf e}_\phi \end{array}\right) -⑤$$$$\left(\begin{array}{ccc} {\bf e}_{\xi} \\ {\bf e}_{\eta} \\ {\bf e}_{\zeta} \end{array}\right)=
\left(\begin{array}{ccc} \cos{\psi} & \sin{\psi} & 0 \\
-\sin{\psi} & \cos{\psi} & 0 \\
0 & 0 & 1 \end{array}\right)
\left(\begin{array}{ccc} {\bf e}_{\xi^{”}} \\ {\bf e}_\theta \\ {\bf e}_{\zeta} \end{array}\right) -⑥$$
尚、回転1の回転軸は $z$ 軸であるため ${\bf e}_\phi={\bf e}_z$ 、回転2(⑤)の回転軸は $\eta’$ 軸であるため ${\bf e}_\theta={\bf e}_{\eta’}$ 、回転3(⑥)の回転軸は $\zeta$ 軸であるため ${\bf e}_\psi={\bf e}_\zeta$ となります。
コマの運動方程式
コマの角速度 ${\bf\omega}$ は、($\dot{\phi},\dot{\theta},\dot{\psi}$)は各回転軸回りの角速度を表すため、
$${\bf\omega}=\dot{\phi}{\bf e}_\phi+\dot{\theta}{\bf e}_\theta+\dot{\psi}{\bf e}_\psi -⑦$$
これを座標 $O-\xi\eta\zeta$ に変換すると以下が得られます。(⑧の導出)
$$\omega_\xi=-\dot{\phi}\sin{\theta}\cos{\psi}+\dot{\theta}\sin{\psi} -⑧$$$$\omega_\eta=\dot{\phi}\sin{\theta}\sin{\psi}+\dot{\theta}\cos{\psi} -⑧$$$$\omega_\zeta=\dot{\phi}\cos{\theta}+\dot{\psi} -⑧$$
力のモーメント ${\bf N}$ は、固定点 $O$ から重心までの距離を $L$ 、質量を $M$ とすると、${\bf e}_\theta$ と方向が一致するため、
$${\bf N}=MgL\sin{\theta}{\bf e}_\theta -⑨$$
これを座標 $O-\xi\eta\zeta$ に変換すると以下が得られます。(⑩の導出)
$$N_\xi=MgL\sin{\theta}\sin{\psi} -⑩$$$$N_\eta=MgL\sin{\theta}\cos{\psi} -⑩$$$$N_\zeta=0 -⑩$$
以上より、オイラーの方程式は以下になります。
$$I_1\frac{d}{dt}(\dot{\theta}\sin{\psi}-\dot{\phi}\sin{\theta}\cos{\psi})=MgL\sin{\theta}\sin{\psi}$$$$+(I_1-I_3)(\dot{\theta}\cos{\psi}+\dot{\phi}\sin{\theta}\sin{\psi})(\dot{\phi}\cos{\theta}+\dot{\psi}) -⑪$$$$I_1\frac{d}{dt}(\dot{\theta}\cos{\psi}+\dot{\phi}\sin{\theta}\sin{\psi})=MgL\sin{\theta}\cos{\psi}$$$$+(I_3-I_1)(\dot{\theta}\sin{\psi}-\dot{\phi}\sin{\theta}\cos{\psi})(\dot{\phi}\cos{\theta}+\dot{\psi}) -⑫$$$$I_3\frac{d}{dt}(\dot{\phi}\cos{\theta}+\dot{\psi})=0 -⑬$$
⑧⑩の導出
⑤と⑥より ${\bf e}_\phi$ と ${\bf e}_\theta$ を(${\bf e}_\xi,{\bf e}_\eta,{\bf e}_\zeta$)で表すと、
$${\bf e}_\phi=-\sin{\theta}\cos{\psi}{\bf e}_\xi+\sin{\theta}\sin{\psi}{\bf e}_\eta+\cos{\theta}{\bf e}_\zeta -(1)$$$${\bf e}_\theta=\sin{\psi}{\bf e}_\xi+\cos{\psi}{\bf e}_\eta -(2)$$
(1)と(2)を⑦に代入すると⑧が得られ、(2)を⑨に代入すると⑩が得られます。
コマの運動の特徴
オイラーの方程式⑨を解くと、コマの運動には以下の保存則が成り立つことが分かります。
- 角速度の保存
⑬より $\zeta$ 軸方向の角速度 $\omega_\zeta$ は一定となります。$$\omega_\zeta=\dot{\phi}\cos{\theta}+\dot{\psi}=\Omega=\mathrm{const} -⑭$$ - 角運動量の保存
$z$ 軸方向の角運動量 $L_z$ は一定となります。(⑮の導出)$$L_z=I_1\dot{\phi}\sin^2{\theta}+I_3\Omega\cos{\theta}=\mathrm{const} -⑮$$ - 運動エネルギーの保存
ここで $\omega_A$ は $\xi^{”}$ 軸周りの角速度を表します。(⑯の導出)
$$\frac{1}{2}I_1(\omega_A^2+\omega_\theta^2)+MgL\cos{\theta}=\mathrm{const} -⑯$$
⑮の導出
⑪に $\cos{\psi}$ を掛け、⑫に $-\sin{\psi}$ を掛けて加えると、
$$\ddot{\phi}\sin{\theta}+\dot{\phi}\dot{\theta}\cos{\theta}-\dot{\theta}\dot{\psi}+\frac{I_1-I_3}{I_1}\Omega\dot{\theta}\sin{\theta}=0$$$$\frac{d}{dt}(\dot{\phi}\sin^2{\theta})-\dot{\theta}\sin{\theta}(\dot{\phi}\cos{\theta}+\dot{\psi})+\frac{I_1-I_3}{I_1}\Omega\dot{\theta}\sin{\theta}=0$$$$\frac{d}{dt}(\dot{\phi}\sin^2{\theta})-\frac{I_3}{I_1}\Omega\dot{\theta}\sin{\theta}=0$$
これを積分すると⑮の右辺が得られます。
$$I_1\dot{\phi}\sin^2{\theta}+I_3\Omega\cos{\theta}=\mathrm{const} \to⑮$$
これが $L_z$ に等しいことは以下のように確認できます。⑤と⑥より、
$${\bf e}_\xi=\cos{\psi}\cos{\theta}{\bf e}_{\xi’}+\sin{\psi}{\bf e}_\theta-\cos{\psi}\sin{\theta}{\bf e}_\phi$$$${\bf e}_\eta=-\sin{\psi}\cos{\theta}{\bf e}_{\xi’}+\cos{\psi}{\bf e}_\theta+\sin{\psi}\sin{\theta}{\bf e}_\phi$$$${\bf e}_\zeta=\sin{\theta}{\bf e}_{\xi’}+\cos{\theta}{\bf e}_\phi$$
角運動量にこれらを代入し、
$${\bf L}=I_1\omega_\xi{\bf e}_\xi+I_1\omega_\eta{\bf e}_\eta+I_3\omega_\zeta{\bf e}_\zeta$$
${\bf e}_z={\bf e}_\phi$ に注意して $L_z$ を求め、⑧を代入すると、
$$L_z={\bf L}\cdot{\bf e}_z=-I_1\omega_\xi\cos{\psi}\sin{\theta}+I_1\omega_\eta\sin{\psi}\sin{\theta}+I_3\omega_\zeta\cos{\theta}$$$$=I_1\dot{\phi}\sin^2{\theta}+I_3\omega_\zeta\cos{\theta}$$
$\omega_\zeta=\Omega$ であるから、これが⑮の右辺に等しいことが分かります。
⑯の導出
⑪に $\sin{\psi}$ を掛け、⑫に $\cos{\psi}$ を掛けて加えると、
$$I_1\ddot{\theta}+I_1\dot{\phi}\dot{\psi}\sin{\theta}-(I_1-I_3)\Omega\dot{\phi}\sin{\theta}=MgL\sin{\theta} -⑰$$
⑭と⑮を用いて $\dot{\phi}$ と $\dot{\psi}$ を消去すると、
$$\ddot{\theta}-\Big(\frac{L_z-I_3\Omega\cos{\theta}}{I_1\sin^2{\theta}}\Big)^2\cos{\theta}\sin{\theta}+\frac{I_3\Omega}{I_1}\Big(\frac{L_z-I_3\Omega\cos{\theta}}{I_1\sin{\theta}}\Big)=\frac{MgL}{I_1}\sin{\theta}$$$$\frac{1}{2}\frac{d}{dt}\Big[\dot{\theta}^2+\Big(\frac{L_z-I_3\Omega\cos{\theta}}{I_1\sin{\theta}}\Big)^2\Big]=-\frac{d}{dt}\Big(\frac{MgL}{I_1}\cos{\theta}\Big)$$
これを積分し、$L_z$ に再び⑮を代入すると、
$$\frac{I_1}{2}\Big[\dot{\theta}^2+\Big(\frac{L_z-I_3\Omega\cos{\theta}}{I_1\sin{\theta}}\Big)^2\Big]+MgL\cos{\theta}=\mathrm{const}$$$$\frac{I_1}{2}(\dot{\theta}^2+\dot{\phi}^2\sin^2{\theta})+MgL\cos{\theta}=\mathrm{const} -(3)$$
ここで⑤より、${\bf e}_\phi$ を ${\bf e}_{\xi^{”}},{\bf e}_\zeta$ で表すと、
$${\bf e}_\phi=-\sin{\theta}{\bf e}_{\xi^{”}}+\cos{\theta}{\bf e}_\zeta$$
これを⑦を代入すると、${\bf e}_\psi={\bf e}_\zeta$ であるから、
$${\bf\omega}=-\dot{\phi}\sin{\theta}{\bf e}_{\xi^{”}}+\dot{\theta}{\bf e}_\theta+(\dot{\psi}+\dot{\phi}\cos{\theta}){\bf e}_\zeta$$
従って $\omega_{\xi^{”}}=-\dot{\phi}\sin{\theta}$ 、$\omega_\theta=\dot{\theta}$ であるから、これを(3)に代入すると、
$$\frac{I_1}{2}(\omega_{\xi^{”}}^2+\omega_\theta^2)+MgL\cos{\theta}=\mathrm{const}$$
尚、⑯では $\omega_{\xi^{”}}=\omega_A$ と置き換えています。
定常歳差運動
コマの運動における歳差運動とは、$\phi$ の変化を指します。$\theta$ を一定とし、⑰で $\dot{\theta}=0$ とすると、
$$I_1\dot{\phi}^2\cos{\theta}-I_3\Omega\dot{\phi}+MgL=0$$
これを $\dot{\phi}$ について解くと、
$$\dot{\phi}=\frac{I_3\Omega}{2I_1\cos{\theta}}\left(1\pm\sqrt{1-\frac{4MgLI_1\cos{\theta}}{I_3^2\Omega^2}}\right)$$
この根号内は負にはならないので、その条件は、
$$\Omega\ge\frac{\sqrt{4MgLI_1\cos{\theta}}}{I_3} -(4)$$
- 速い歳差運動
(4)で等号が成り立つ場合は以下になります。
$$\dot{\phi}=\frac{I_3\Omega}{2I_1\cos{\theta}}$$ - 遅い歳差運動
$\Omega$ が十分に大きい(根号内の第2項が十分に小さい)とすると、
$$\dot{\phi}=\frac{MgL}{I_3\Omega}$$
実際のコマでは、速い歳差運動は摩擦によってすぐに減衰し、遅い歳差運動だけが観察されます。また、$g=0$ の自由回転では速い歳差運動だけが存在します。
微小章動
コマの運動における章動とは、$\theta$ の変化を指します。$\dot{\phi}$ を十分に小さいとすると、$A$ と $\delta$ を章動は以下で表されます。(⑱の導出)
$$\dot{\theta}=-A\sin{\theta}\sin{(\alpha t+\delta)} -⑱$$$$\alpha\equiv\frac{I_3\Omega}{I_1}$$
章動が小さい場合は、$\sin{\theta}=\sin{\theta_0}$ として積分すると、
$$\theta(t)=\frac{A}{\alpha}\sin{\theta_0}\cos{(\alpha t+\delta)}+\mathrm{const}$$
以上より、章動の角周波数 $\alpha$ は $\Omega$ とともに増大し、章動の振幅は $\alpha$ に反比例していることが分かります。
⑱の導出
⑭で $\dot{\phi}$ を十分に小さいとすると、
$$\dot{\psi}=\Omega-\dot{\phi}\cos{\theta}\simeq\Omega$$
これを⑰に代入すると、
$$I_1\ddot{\theta}+I_3\Omega\dot{\phi}\sin{\theta}=MgL\sin{\theta} -(5)$$
⑮を時間微分し、$\dot{\phi}$ を十分に小さいとすると、
$$\ddot{\phi}\sin{\theta}=\frac{I_3}{I_1}\Omega\dot{\theta} -(6)$$
さらに時間微分して、その $\ddot{\theta}$ に(5)を代入すると、
$$\frac{d^2}{dt^2}\dot{\phi}=-\Big(\frac{I_3\Omega}{I_1}\Big)^2\Big(\dot{\phi}-\frac{MgL}{I_3\Omega}\Big)$$
これを積分し、$A$ と $\delta$ を定数とすると、
$$\dot{\phi}=\frac{MgL}{I_3\Omega}+A\cos{(\alpha t+\delta)}$$
これを時間微分し、(6)を代入すると⑱が得られます。
$$\dot{\theta}=-A\sin{\theta}\sin{(\alpha t+\delta)} \to⑱$$


